Законы Ньютона. Равнодействующая

Инерциальные системы отсчета. Первый закон Ньютона. Принцип относительности Галилея
Инерциальная система отсчета — это система отсчета, в которой справедлив закон инерции: материальная точка, когда на нее не действуют никакие силы (или действуют силы, взаимно уравновешенные), находится в состоянии покоя или равномерного прямолинейного движения.
Закон этот был открыт Галилеем в 1632 г. и сформулирован Ньютоном в 1687 г. как первый закон механики.
Любая система отсчета, движущаяся по отношению к инерциальной системе отсчета поступательно, равномерно и прямолинейно, также является инерциальной системой отсчета, т. е. в ней выполняется первый закон Ньютона. Следовательно, инерциальных систем отсчета может быть сколь угодно много. Система отсчета, движущаяся с ускорением по отношению к инерциальной системе отсчета, неинерциальна и закон инерции в ней не выполняется.
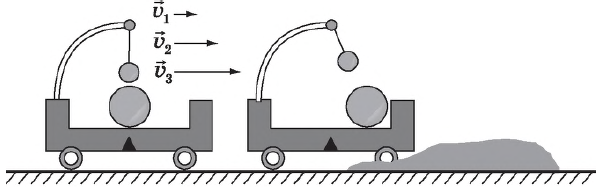
Сказанное подтверждается опытом, изображенным на рисунке. Сначала тележка движется прямолинейно и равномерно относительно земли. На ней находятся два шарика, один из которых лежит на горизонтальной поверхности, а другой подвешен на нити. Силы, действующие на каждый шарик по вертикали, уравновешены, по горизонтали никакие силы на шарики не действуют (силой сопротивления воздуха в данном случае можно пренебречь).
Шарики будут находиться в покое относительно тележки при любой скорости ее движения ($υ_1, υ_2, υ_3$ и т. д.) относительно Земли — главное, чтобы эта скорость была постоянна.
Но когда тележка попадает на песчаную насыпь, ее скорость быстро уменьшается, в результате чего тележка останавливается. Во время торможения тележки оба шарика приходят в движение, т. е. изменяют свою скорость относительно тележки, хотя нет никаких сил, которые толкали бы их.
Здесь первой (условно неподвижной) системой отсчета является Земля. Второй системой отсчета, движущейся относительно первой, является тележка. Пока тележка двигалась прямолинейно и равномерно, шарики находились в состоянии покоя относительно тележки, т. е. закон инерции выполнялся. Как только тележка начала тормозить, т. е. начала двигаться с ускорением относительно первой инерциальной системы отсчета (Земли), закон инерции перестал выполняться.
Если относительно какой-нибудь системы отсчета тело движется с ускорением, не вызванным действием на него других тел, то такую систему называют неинерциальной.
В неинерциальных системах отсчета основное положение механики о том, что ускорение тела вызывается воздействием на него других тел, не выполняется.
Следует отметить, что невозможно найти строго инерциальную систему отсчета. Реальная система отсчета всегда связывается с каким-нибудь конкретным телом (Землей, корпусом корабля или самолета и т. и.), по отношению к которому и изучается движение различных объектов. Поскольку все реальные тела движутся с тем или иным ускорением, любая реальная система отсчета может рассматриваться как инерциальная лишь приближенно.
С очень высокой степенью точности инерциальной можно считать гелиоцентрическую систему, связанную с центром Солнца и с координатными осями, направленными на три далекие звезды. Эта система используется в задачах небесной механики и космонавтики. Для решения большинства технических задач инерциальной системой отсчета можно считать любую систему, жестко связанную с Землей (или с любым телом, которое покоится или движется равномерно и прямолинейно относительно поверхности Земли).
Первый закон Ньютона
Любое тело продолжает удерживаться в своем состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние.
Так был сформулирован Ньютоном в 1687 г. первый закон механики, или закон инерции.
Суть закона инерции впервые была изложена в одной из книг итальянского ученого Галилео Галилея, опубликованной в начале XVII в.
Ньютон обобщил выводы Галилея, сформулировав закон инерции, и включил его в качестве первого из трех законов в основу механики. Поэтому данный закон называют первым законом Ньютона.
Однако со временем выяснилось, что первый закон Ньютона выполняется не во всех системах отсчета, а только в инерциальных. Поэтому с точки зрения современных представлений первый закон Ньютона формулируется так:
Существуют системы отсчета, называемые инерциальными, относительно которых свободные тела движутся прямолинейно и равномерно.
Под свободным телом здесь понимают тело, на которое не оказывают воздействие другие тела.
Следует помнить, что в первом законе Ньютона речь идет о телах, которые могут рассматриваться как материальные точки.
Принцип относительности Галилея
Принцип относительности Галилея гласит:
Во всех инерциальных системах отсчета законы механики имеют одинаковый вид.
Это означает, что уравнения, выражающие законы механики, не меняются (инвариантны) при преобразованиях Галилея.
Преобразования Галилея заключаются в преобразовании координат $r↖{→} (х, у, z)$ и времени $t$ движущейся материальной точки при переходе от одной инерциальной системы отсчета (ИСО) к другой:
$r↖{→}={r'}↖{→}+υ↖{→}t, t=t'$ (1.47)
Для координаты $х$, например, это означает:
$x=x'+υt, t=t',$
где $υ$ — относительная скорость (постоянная) движения двух ИСО, $r↖{→}$ и ${r'}↖{→}$ — радиус-векторы, а х и х1 — координаты точки в этих двух ИСО. Согласно преобразованию Галилея (1.47), время не изменяется при переходе из одной ИСО в другую: принцип относительности Галилея основан на представлениях об абсолютном времени и абсолютном пространстве, что означает одинаковость (одновременность) протекания событий во всех ИСО. Преобразования координат легко понять, если в некоторый момент времени $t_0$, принятый за начальный $t_0=0$, одну из систем координат $К(ХYZ)$ — неподвижную — совместить с другой — $К'(Х'Y'Z')$ — подвижной и зафиксировать систему $К$.
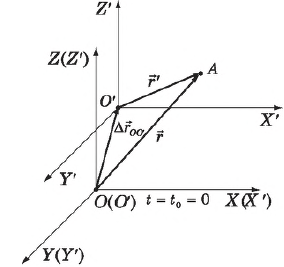
Тогда в любой последующий момент времени положение некоторой точки $А$, движущейся относительно обеих систем координат, определяется в системе $К$ радиус-вектором $r↖{→}$, а в системе $К'$ — радиус-вектором ${r'}↖{→}$. Вектор, соединяющий начала координат $О$ неподвижной и $О'$ — подвижной систем координат, равен вектору перемещения системы $К'$ относительно $К:{OO'}↖{-}=∆r↖{→}{OO}$. Согласно правилу сложения векторов
$r↖{→}={r'}↖{→}+∆r↖{→}{OO}$
Однако вектор перемещения можно выразить через скорость движение системы $К'$ относительно $К: ∆r↖{→}{OO}=υ↖{→}t$. Поэтому
$r↖{→}={r'}↖{→}+υ↖{→}t$
что совпадает с (1.47).
Из уравнения (1.47) вытекает закон сложения скоростей:
$u↖{→}={u'}↖{→}+υ↖{→},$
где $u$ и $u'$ — скорости точки относительно систем $К$ и $К'$ соответственно.
Принцип относительности Галилея означает, что никакими механическими опытами нельзя обнаружить движение одной инерциальной системы координат относительно другой. Именно поэтому, находясь в салоне сверхзвукового самолета, пассажиры могут спокойно передвигаться, не чувствуя его скорости.
Не нужно, однако, думать, что выполнение принципа относительности означает полную тождественность движения одного и того же тела относительно разных инерциальных систем координат. Тождественны лишь законы движения. Характер же движения определяется начальными условиями (начальными скоростями и координатами тела), которые различны в разных системах отсчета.
Так, камень, выпущенный из рук в движущемся вагоне поезда, будет падать вертикально лишь относительно стен вагона, а для наблюдателя, находящегося на платформе, он будет двигаться по параболе. Объясняется это тем, что начальные скорости разные: относительно стен вагона начальная скорость равна нулю, а относительно Земли она равна скорости движения вагона.
Взаимодействие. Сила. Принцип суперпозиции сил
Взаимодействие в физике — это воздействие тел или частиц друг на друга, приводящее к изменению их движения.
Близкодействие и дальнодействие (или действие на расстоянии). О том, как осуществляется взаимодействие тел, в физике издавна существовали две точки зрения. Первая из них предполагала наличие некоторого агента (например, эфира), через который одно тело передает свое влияние на другое, причем с конечной скоростью. Это теория близкодействия. Вторая предполагала, что взаимодействие между телами осуществляется через пустое пространство, не принимающее никакого участия в передаче взаимодействия, причем передача происходит мгновенно. Это теория дальнодействия. Она, казалось бы, окончательно победила после открытия Ньютоном закона всемирного тяготения. Так, например, считалось, что перемещение Земли должно сразу же приводить к изменению силы тяготения, действующей на Луну. Кроме самого Ньютона, позднее концепции дальнодействия придерживались Кулон и Ампер.
После открытия и исследования электромагнитного поля теория дальнодействия была отвергнута, так как было доказано, что взаимодействие электрически заряженных тел осуществляется не мгновенно, а с конечной скоростью (равной скорости света: $c=3·10^8$ м/с) и перемещение одного из зарядов приводит к изменению сил, действующих на другие заряды, не мгновенно, а спустя некоторое время. Возникла новая теория близкодействия, которая была затем распространена и на все другие виды взаимодействий. Согласно теории близкодействия взаимодействие осуществляется посредством соответствующих полей, окружающих тела и непрерывно распределенных в пространстве (т. е. поле является тем посредником, который передает действие одного тела на другое). Взаимодействие электрических зарядов — посредством электромагнитного поля, всемирное тяготение — посредством гравитационного поля.
На сегодняшний день физике известны четыре типа фундаментальных взаимодействий, существующих в природе (в порядке возрастания интенсивности): гравитационное, слабое, электромагнитное и сильное взаимодействия.
Фундаментальными называются взаимодействия, которые нельзя свести к другим типам взаимодействий.
Фундаментальные взаимодействия отличаются интенсивностью ж радиусом действия. Под радиусом действия понимают максимальное расстояние между частицами, за пределами которого их взаимодействием можно пренебречь.
По радиусу действия фундаментальные взаимодействия делятся на дальнодействующие (гравитационное и электромагнитное) и короткодействующие (слабое и сильное).
Гравитационное взаимодействие универсально: в нем участвуют все тела в природе — от звезд, планет и галактик до микрочастиц: атомов, электронов, ядер. Его радиус действия равен бесконечности. Однако как для элементарных частиц микромира, так и для окружающих нас предметов макромира силы гравитационного взаимодействия настолько малы, что ими можно пренебречь. Оно становится заметным с увеличением массы взаимодействующих тел и потому определяющим в поведении небесных тел и образовании и эволюции звезд.
Основные характеристики фундаментальных взаимодействий
| Взаимодействие | Взаимодействующие частицы | Радиус действия, $м$ | Относительная интенсивность |
| Гравитационное | Все | $∞$ | 1 |
| Слабое | Все, кроме фотона | $10^{-17}$ | $10^{32}$ |
| Электромагнитное | Заряженные частицы | $∞$ | $10^{36}$ |
| Сильное | Адроны | $10^{-15}$ | $10^{38}$ |
Слабое взаимодействие присуще всем элементарным частицам, кроме фотона. Оно отвечает за большинство ядерных реакций распада и многие превращения элементарных частиц.
Электромагнитное взаимодействие определяет структуру вещества, связывая электроны и ядра в атомах и молекулах, объединяя атомы и молекулы в различные вещества. Оно определяет химические и биологические процессы. Электромагнитное взаимодействие является причиной таких явлений, как упругость, трение, вязкость, магнетизм и составляет природу соответствующих сил. На движение макроскопических электронейтральных тел оно существенного влияния не оказывает.
Сильное взаимодействие осуществляется между адронами, именно оно удерживает нуклоны в ядре.
В 1967 г. Шелдон Глэшоу, Абдус Салам и Стивен Вайнберг создали теорию, объединяющую электромагнитное и слабое взаимодействия в единое электрослабое взаимодействие с радиусом действия $10^{-17} м$, в пределах которого исчезает различие между слабым и электромагнитным взаимодействиями.
В настоящее время выдвинута теория великого объединения, согласно которой существуют лишь два типа взаимодействий: объединенное, куда входят сильное, слабое и электромагнитное взаимодействия, и гравитационное взаимодействие.
Есть также предположение, что все четыре взаимодействия являются частными случаями проявления единого взаимодействия.
В механике взаимное действие тел друг на друга характеризуется силой. Более общей характеристикой взаимодействия является потенциальная энергия.
Силы в механике делятся на гравитационные, упругости и трения. Как уже упоминалось выше, природа механических сил обусловлена гравитационным и электромагнитным взаимодействиями. Только эти взаимодействия можно рассматривать как силы в смысле механики Ньютона. Сильные (ядерные) и слабые взаимодействия проявляются на таких малых расстояниях, при которых законы механики Ньютона, а вместе с ними и понятие механической силы теряют смысл. Поэтому термин «сила» в этих случаях следует воспринимать как «взаимодействие».
Сила
Сила в механике — это величина, являющаяся мерой взаимодействия тел.
При механическом движении проявляются следующие виды сил: силы упругости, силы трения и гравитационные силы (всемирного тяготения).
Действие одного тела на другое приводит как к изменению скорости всего тела как целого, так и к изменению скорости отдельных его частей.
Мерой этого действия является сила. Часто не указывают, какое тело и как действовало на данное тело. Просто говорят, что на тело действует сила, или к нему приложена сила.
Действие одного тела на другое может производиться как при непосредственном контакте (давление, трение), так и посредством создаваемых телами полей (электромагнитное поле, гравитационное поле).
Проявлением действия силы является изменение ускорения тела.
Сила, как и скорость, — векторная величина, т. е. имеет не только численное значение, но и направление. Сила обычно обозначается буквой $F↖{→}$, модуль силы — буквой $F$ (без стрелки). Прямая, вдоль которой направлена сила, называется линией действия силы. Когда говорят о силе, важно указать, к какой точке тела приложена действующая на него сила. Если речь идет об абсолютно твердом (недеформируемом) теле, то можно считать, что сила приложена к любой точке на линии ее действия.
Итак, результат действия силы на тело зависит от ее модуля, направления и точки приложения.
Иначе говоря, сила — векторная величина, характеризующаяся численным значением, направлением в пространстве и точкой приложения.
Единицей силы в СИ является ньютон (H). Один ньютон (1 H) — это сила, которая за $1$с изменяет скорость тела массой $1$ кг на $1$ м/с. Эта единица названа в честь великого английского ученого Исаака Ньютона (1642-1727). На практике применяются также килоньютоны и миллиньютоны:
$1кH|=1000H, 1мH=0.001H.$
Принцип суперпозиции сил
Обычно на любое движущееся тело действует не одна, а сразу несколько сил. Так, например, на парашютиста, спускающегося на землю, действуют сила тяжести и сила сопротивления воздуха. На тело, висящее на пружине, действуют две силы: сила тяжести и сила упругости пружины.
В каждом подобном случае несколько сил, приложенных к телу, можно заменить одной суммарной силой $F↖{→}$, равноценной по своему действию этим силам. Сила, производящая на тело такое же действие, как несколько одновременно действующих сил, называется равнодействующей этих сил:
$F↖{→}=∑↙{i=1}↖{n}{F_i}↖{→}={F_1}↖{→}+{F_2}↖{→}+...+{F_n}↖{→}$
В этом состоит принцип суперпозиции (наложения) сил.
Равнодействующая сила, действующая на частицу со стороны других тел, равна векторной сумме сил, с которыми каждое из этих тел действует на частицу.
Для нахождения равнодействующей силы пользуются правилами сложения векторов (поскольку сила — векторная величина), в частности, сложение двух сил производится по правилу параллелограмма.
О двух силах, равных по величине и направленных вдоль одной прямой в противоположные стороны, говорят, что они уравновешивают, или компенсируют друг друга. Равнодействующая $F$ таких сил всегда равна нулю и потому изменить скорость тела не может.
Для изменения скорости тела относительно Земли необходимо, чтобы равнодействующая всех приложенных к телу сил была отлична от нуля. В том случае, когда тело движется в направлении равнодействующей силы, его скорость возрастает; при движении в противоположном направлении скорость тела убывает. Таким образом, направление скорости не всегда совпадает с направлением действующей силы $F$, а вот изменение направления скорости (а следовательно, и направление ускорения) всегда совпадает с направлением действующей силы.
Второй закон Ньютона
Второй закон Ньютона формулируется так:
Ускорение тела прямо пропорционально равнодействующей всех сил, приложенных к телу, и обратно пропорционально его массе. Направление ускорения совпадает с направлением равнодействующей всех сил.
Следует помнить, что во втором законе Ньютона, так же, как и в первом, под телом подразумевается материальная точка, движение которой рассматривается в инерциальной системе отсчета.
Математически второй закон Ньютона выражается формулой:
$a↖{→}={F↖{→}}/{m}$
В скалярном виде второй закон можно записать:
${a_x}↖{→}={{F_x}↖{→}}/{m}$
$a={F}/{m}$
Отсюда можно вывести два следствия:
- Чем больше сила, приложенная к телу, тем больше его ускорение, и следовательно, тем быстрее изменяется скорость движения этого тела.
- Чем больше масса тела, тем меньшее ускорение оно получает в результате действия данной силы и потому тем медленнее изменяет свою скорость.
Из формулы $a↖{→}={F↖{→}}/{m}$ следует:
$F↖{→}=a↖{→}m$
Формулировка второго закона механики, данная самим Ньютоном, такова:
Изменение количества движения пропорционально приложенной движущей силе и происходит по направлению той прямой, по которой эта сила действует.
В современном виде закон этот записывается следующим образом:
${d(mυ↖{→})}/{dt}=F↖{→}$
где $mυ↖{→}$ — количество движения тела. Количество движения называют также импульсом тела $p↖{→}$:
$p↖{→}=mυ↖{→}$
Когда равнодействующая сил, приложенных к телу, постоянна ($F↖{→}=const$), дифференцирование в ${d(mυ↖{→})}/{dt}=F↖{→}$ можно заменить разностью $∆$, поскольку изменение скорости (ускорение) постоянно:
$∆p↖{→}=F↖{→}∆t$
Второй закон Ньютона иногда называют основным законом динамики. После его открытия стало возможным решать такие задачи о движении тел, которые до Ньютона казались неразрешимыми. Многие казавшиеся ранее непонятными явления теперь были объяснены на основе открытых законов физики.
На основании второго закона Ньютона вводится единица силы в СИ — ньютон (Н). Один ньютон ($1Н$) — это сила, с которой нужно действовать на тело массой в $1$ кг, чтобы сообщить ему ускорение в $1$ м/$с^2$.
Подставив в формулу значения ускорения и массы с их размерностями из приведенного определения, выразим размерность силы в $1Н$ через основные единицы СИ:
$1H=1кг·1$м/$с^2=1кг·$м/$с^2$
Третий закон Ньютона
Третий закон Ньютона гласит:
Действию всегда есть равное и противоположное противодействие, иначе — взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны.
В своем первом законе Ньютон описал движение тела, не подверженного действию других тел. В этом случае тело либо сохраняет свое состояние покоя, либо движется равномерно и прямолинейно (относительно инерциальной системы отсчета).
Во втором законе Ньютона речь идет о прямо противоположной ситуации. Теперь на данное тело действуют внешние тела, причем их количество может быть произвольным. Под действием окружающих тел рассматриваемое тело начинает двигаться с ускорением, причем произведение массы данного тела на его ускорение оказывается равным действующей силе.
Сформулировав эти два закона, Ньютон обратился к анализу ситуации, когда во взаимодействии участвуют только два тела. Допустим, имеются два тела $А$ и $В$, которые притягивают друг друга с силами $F$ и $F'$, Может ли одна из этих сил быть больше другой? Размышление над этой проблемой привело Ньютона к выводу, что такого быть не может: силы взаимодействия двух тел всегда равны друг другу. Каким образом Ньютон пришел к такому заключению? Вот как он рассуждал: «Относительно притяжения дело может быть изложено вкратце следующим образом: между двумя взаимно притягивающимися телами надо вообразить какое-либо препятствие, мешающее их сближению. Если бы одно из тел $А$ притягивалось телом $В$ сильнее, нежели тело $В$ притягивается телом $А$, то препятствие испытывало бы со стороны тела $А$ большее давление, нежели со стороны тела $В$, и, следовательно, не осталось бы равновесия. Преобладающее давление вызвало бы движение системы, состоящей из этих двух тел и препятствия, в сторону тела $В$, ив свободном пространстве эта система, двигаясь ускоренно, ушла бы в бесконечность. Такое заключение нелепо и противоречит первому закону. Отсюда следует, что оба тела давят на препятствие с равными силами, а значит, и притягиваются взаимно с таковыми же».
Следует помнить, что силы, о которых говорится в законе Ньютона, никогда не уравновешивают друг друга, поскольку они приложены к разным телам. Две равные по модулю и противоположно направленные силы уравновешивают друг друга в том случае, если они приложены к одному телу. Тогда их равнодействующая равна нулю, и тело при этом находится в равновесии, т. е. либо покоится, либо движется равномерно и прямолинейно.

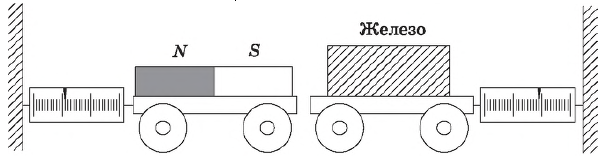
Опыты подтверждают вывод Ньютона. Если, например, взять две тележки и на одной из них закрепить магнит, а на другой кусок железа, а затем соединить их с динамометрами, то мы увидим, что показания этих приборов совпадут. Это означает, что сила, с которой магнит притягивает к себе железо, равна по величине силе, с которой железо притягивает к себе магнит. Эти силы равны по абсолютной величине и противоположны по направлению: сила притяжения к магниту направлена влево, а сила притяжения к железу вправо.
Итак, третий закон Ньютона на более привычном для нас языке может быть сформулирован так:
Силы, с которыми взаимодействуют любые два тела, всегда равны по величине и противоположны по направлению.
Математически он записывается в следующем виде:
${F_1}↖{→}=-{F_2}↖{→}$
Знак «минус» показывает, что векторы сил направлены в противоположные стороны. Используя второй закон Ньютона, можно записать:
$m_1{a_1}↖{→}=-m_2{a_2}↖{→}$
Отсюда следует, что
${a_1}/{a_2}={m_2}/{m_1}$
Таким образом, отношение модулей ускорений двух взаимодействующих тел определяется исключительно их массами (чем меньше масса тела, тем большее ускорение оно приобретает) и не зависит от природы сил взаимодействия.
Третий закон Ньютона обосновывает введение самого термина «взаимодействие»: если одно тело действует на другое, то второе также действует на первое. Другими словами, не может быть такого, чтобы одно тело на другое действовало, а второе на первое — нет. Как писал сам Ньютон, «если кто нажимает пальцем на камень, то и палец его также нажимается камнем. Если лошадь тащит камень, привязанный к канату, то и обратно (если можно так выразиться) она с равным усилием оттягивается к камню».

Онлайн-школа «Турбо»
- Прямая связь с преподавателем
- Письменные дз с проверкой
- Интересные онлайн-занятия
- Душевное комьюнити



